Aller au contenu
Aller au contenu 
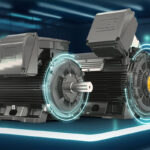
Les deux types de moteurs électriques fabriqués, synchrone ou asynchrone, fonctionnent grâce à deux éléments principaux : le rotor, qui est tournant, et le stator, qui est fixe. Cependant, leurs différences de fonctionnement sont nombreuses. Plus complexe, le moteur synchrone nécessite un contrôle précis pour assurer la synchronisation des aimants permanents ou des bobines du rotor avec le champ magnétique tournant produit par le stator.
WEG conçoit de nouvelles technologies, à l’instar des moteurs à aimants permanents combinés à la réluctance synchrone, véritables héritiers du principe du moteur magnétique, afin d’améliorer en continu l’efficience énergétique des applications industrielles.
En revanche, les moteurs asynchrones, plus simples, fonctionnent grâce au glissement entre le champ tournant créé par le stator et la cage d’écureuil du rotor, ce qui les rend généralement moins économes en énergie que les machines synchrones. Quelles sont les différences, les avantages et les inconvénients de ces moteurs pour répondre aux besoins des applications industrielles les plus variées ?
Fonctionnement des moteurs synchrones et asynchrones
Le fonctionnement des moteurs synchrones et des moteurs asynchrones se différencie par la vitesse de rotation du rotor par rapport au champ magnétique tournant créé par le stator. Au-delà de cette différence principale, comment fonctionne une machine synchrone et une machine à induction ?
Comment fonctionne un moteur asynchrone ?
Malgré un champ magnétique tournant créé par le stator induisant des courants dans le rotor, la vitesse de rotation du rotor est plus faible que celle du champ magnétique tournant du stator. Cette asynchronie crée un glissement. C’est ce glissement qui génère le couple nécessaire pour mettre le rotor en rotation. Ces courants produisant le champ magnétique propre au rotor sont appelés « courants induits ».
Le couple nécessaire à la rotation du rotor est généré d’abord par le courant induit par le champ magnétique tournant du stator, qui tourne à une vitesse supérieure à celle du rotor, puis par l’interaction entre ce champ magnétique et celui induit dans le rotor. Au démarrage des moteurs asynchrones, le glissement est maximal car le rotor est à l’arrêt. À mesure que le rotor accélère, le glissement diminue. Cependant, lorsque la charge sur le moteur augmente, le glissement augmente de nouveau. Cette augmentation du glissement permet aux moteurs asynchrones de générer plus de couple pour répondre à la demande de charge accrue.
Comment fonctionne un moteur synchrone ?
Le principe de fonctionnement d’un moteur synchrone est plus simple que celui d’un moteur asynchrone. En effet, la vitesse de rotation du rotor est identique à la fréquence du champ magnétique tournant généré par le stator. Grâce à cette synchronisation, il n’y a plus de glissement et la vitesse de rotation reste constante dès le démarrage. Bien souvent, un moteur synchrone est couplé à un variateur de fréquence pour ajuster la fréquence et la tension d’alimentation. La synchronisation s’opère ainsi très rapidement, ce qui offre à ce type de machine une efficacité énergétique élevée, un couple constant et une précision, notion très importante pour des applications telles que les systèmes de pompages, les compresseurs, les machines à papier et bien d’autres encore.
A noter qu’il existe différentes technologies pour le fonctionnement des moteurs synchrones. Les technologies les plus utilisées incluent les moteurs à aimants permanents, les moteurs à reluctance synchrone et les moteurs à commutation électronique.
Les différences clés entre un moteur synchrone et asynchrone
Même si ces deux types de moteurs électriques sont composés d’un stator fixe et d’un rotor en mouvement, plusieurs différences sont notables.
Les trois principales différences
La première des différences se situe dans la composition du rotor. Des aimants permanents ou un rotor bobiné est utilisé pour un moteur synchrone, tandis qu’un rotor à cage d’écureuil est utilisé pour un moteur asynchrone. La vitesse de rotation du rotor est identique à celle du champ magnétique tournant pour le moteur synchrone. Pour un moteur asynchrone, ces vitesses de rotation sont différentes. Cela entraîne un glissement et un rendement inférieur à celui d’un moteur synchrone.
Lors du démarrage, les moteurs synchrones ne peuvent pas toujours être démarrés en direct sur le réseau. Selon la technologie utilisée, un variateur de vitesse ou une autre méthode de démarrage peut être nécessaire pour limiter le courant d’appel et assurer une synchronisation adéquate.
Les moteurs asynchrones monophasés ou triphasés peuvent démarrer sans variateur de vitesse. Ils supportent un courant d’appel élevé et peuvent démarrer directement sur le réseau, bien que cela puisse réduire temporairement l’efficacité et entraîner des chocs mécaniques.
Les moteurs électriques synchrones triphasés, même à faible vitesse, offrent un excellent rendement grâce à une conception efficace et à un couple constant, ce qui permet de réduire la consommation d’énergie sur toute la plage de fonctionnement. L’amortissement du prix d’achat d’un moteur synchrone est rapidement compensé par une réduction significative de la facture d’électricité.
En effet, ce type de moteur se classe sur la première marche du podium en termes de rendement énergétique. Le plus haut niveau de rendement établi, IE5, est une évolution qui se traduit par des pertes inférieures de 20 % vis-à-vis du niveau IE4.

WEG a franchi la barrière du niveau actuel et a établi de nouvelles normes : IE6 et au-delà, avec des pertes inférieures de 20 % à celles de l’IE5. Et les niveaux supérieurs suivent le même pourcentage de pertes en moins par rapport au niveau précédent.
En ce qui concerne les moteurs asynchrones, WEG innove constamment pour limiter les pertes et améliorer la performance énergétique. Néanmoins, la machine synchrone reste la plus efficace énergétiquement parlant.
Quels sont les avantages et inconvénients des moteurs synchrones et asynchrones ?
Le mode de fonctionnement et les différences entre les moteurs synchrones et asynchrones engendrent, pour chacun d’eux, des avantages et des inconvénients pouvant aider à choisir la meilleure machine pour votre application.
Critère | Moteur Synchrone | Moteur Asynchrone |
|---|---|---|
Principe de fonctionnement | Le rotor tourne à la même vitesse que le champ magnétique statorique | Le rotor tourne à une vitesse inférieure au champ magnétique statorique créant un glissement |
Vitesse de rotation | La vitesse est constante et synchronisée avec la fréquence de l’alimentation, indépendamment de la charge appliquée. | La vitesse est variable et dépend de la charge appliquée |
Rendement énergétique | Les moteurs synchrones offrent un meilleur rendement, particulièrement à pleine charge | Le rendement des machines asynchrones est plus faible que celui des moteurs synchrones |
Source d’excitation | Une source d’excitation externe (comme un courant continu) ou des aimants permanents intégrés dans le rotor sont nécessaires pour démarrer | La source d’excitation est interne car générée par une induction électromagnétique |
Complexité de contrôle | Le fonctionnement est plus complexe et nécessite des dispositifs de contrôle précis | Le contrôle de la vitesse des moteurs asynchrones est plus simple |
Maintenance | La présence de composants supplémentaires induit une maintenance pouvant être plus importante | Aussi fiables que robustes, les machines asynchrones nécessitent peu d’opérations de maintenance |
Coût | Le prix d’achat est plus élevé en raison de la nécessité de composants supplémentaires | Sa conception simple lui confère un coût initial moins élevé |
Démarrage | Le démarrage est plus complexe. Il nécessite souvent des dispositifs de démarrage (variateur de fréquence) | Le démarrage est simple et souvent direct |
Avantages | Une vitesse constante, un haut rendement
et une stabilité pour des charges variables
| Simplicité et robustesse, un coût d’achat moindre et une maintenance réduite
|
Inconvénients | Un coût supérieur à une machine asynchrone, un contrôle et un démarrage plus complexe, une source d’excitation est nécessaire au démarrage
| Un rendement inférieur à celui d’un moteur synchrone, une vitesse variable en fonction de la charge
|